EN
EN
 AR
AR
 BG
BG
 HR
HR
 CS
CS
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 UK
UK
 TR
TR
 MS
MS
 BE
BE
 HY
HY
 AZ
AZ
 KA
KA
 EO
EO
 LA
LA
 SU
SU
 TG
TG
 UZ
UZ

Ընդհանուր տեղեկություն
Հարցում
Սիմպատիկ ապարատներ
Ծանոթություն
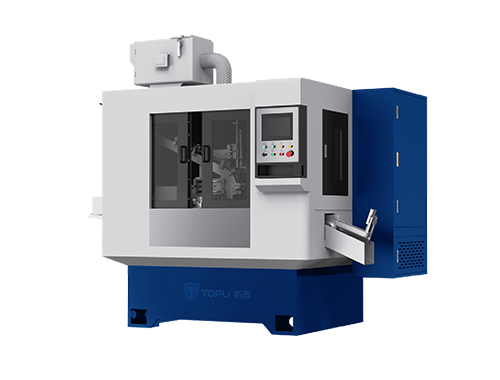
Կենտրոնային գլանապահում մաքինան համարվում է դեպի խշնացի գլանապահում, կիսաճշտ գլանապահում և ճշտ գլանապահում վալվերի գլանի համար։ Այս բարձր ճշտությամբ կենտրոնային մաքինան ունի ընդհանուրապես 5 առանցք, հավաքված է ավտոմատ բեռնում և դուրս բեռնման մեխանիզմով, փոխարինելով տարբեր գլանապահող կորեր՝ հասնելու համար տարբեր ճշտության գլանապահումներին։
Մաքինայի կառուցվածքը և արդյունավետությունը
1) Գլանի գլուխի առաջին և հետաքրքիր սկզբնակետները բոլորը են բեռնաբանային կառուցվածքներ են, որոնց պտույտի ճշգրտությունը բարձր է։ Ակի հաճախականության փոխիչն օգտագործվում է մոտորի կառավարման համար՝ ավտոմատ հատվածային արագության փոխանցման իրականացման համար, որպեսզի հասնեն ստորագրական գծային արագությանը։ Գլանի առավելագույն գծային արագությունը՝ 45մ/վ։
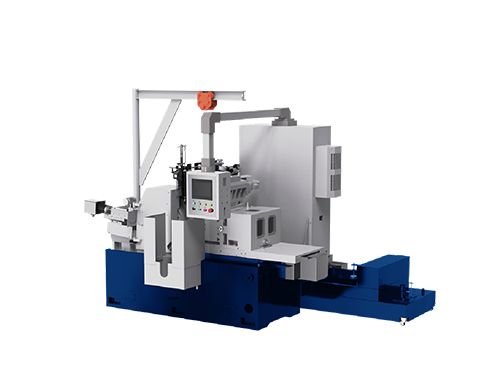
2) Դուրսի գլանի սկզբնակետը. Դուրսի գլանի առաջին և հետաքրքիր սկզբնակետները ունեն միացող սահքի 1:10 դաշտով ամբողջական սահքափոխ բեռնաբաններ։ Հետաքրքիր սկզբնակետը օգտագործում է զույգ կրկնվող կոնտակտային գնդակային բեռնաբաններ ռադիուսային դիրքային և առանցքային դիրքային համար, ապա օգտագործում է համաչափության գնդակային բեռնաբաններ համարյալ համակարգային սահմանում, որը ունի լավ կոշտություն։ Ակի հաճախականության փոխիչն օգտագործվում է մոտորի կառավարման համար՝ անընդհատ արագության փոխանցման հասցեում, որը աշխատում է կայուն և վստահելիվ արագությամբ։
3) Դեղագործի հղումը վառ սերվոմոտորի և գնդակաձիգի կողմից բարձրացնում է, որպեսզի հասնենք արագ և հաճախ հղումին և փոքր կոմպենսացիային։ Հղումը կիրառում է կրկնակի V-տիպի սալիկաձիգի հղում, որը ունի հաշվելի հղում և լավ կարգություն։ Կրկնակի դիրքային ճշգրիտություն ≤0.002;
4) Ալմազական գնդակի կոմպենսատորը՝ կոմպենսատորի հղումը վառ սերվոմոտորի և գնդակաձիգի կողմից կառավարվում է, որը կառավարում է կոմպենսացիայի քանակին և կոմպենսացիայի քանակին։ Կրկնակի շարժումը վառ սերվոմոտորի և գնդակաձիգի կողմից կառավարվում է, որը կարող է համապատասխանաբար կարել։ Կարող է ավտոմատ կոմպենսացիա կատարել, հաշվելի կոմպենսացիա, սինխրոն կոմպենսացիա, նվազագույն կոմպենսացիայի քանակը՝ 0.001։ Կրկնակի դիրքային ճշգրիտություն ≤0.002;
5) Գեղեցիկ գնդակի կոմպենսատորը կիրառում է ձեռնական հղում, արագության կարելի մոտորը դիրքային շարժումը կարող է կարել։ Հաշվելի արագության կարողանում։
Տեխնիկական պարամետրեր
| Կառուցման ճշգրիտություն | Սկզբնական գործում (մմ) | Կեսավոր գործում (մմ) | Վերջնական գործում (մմ) | |
| Կառուցման մաքսավորություն | 0.1-0.15 | 0.03-0.05 | 0.01-0.03 | |
| Շրջանաձևություն | 0.01 | 0.005 | 0.003 | |
| Խռոտություն | Ra1.2 | Ra0.8 | Ra0.3 | |
| Դիրքային սխալ | 0.01 | 0.005 | 0.003 | |
| Ստեղնի կուտում | ±0.01mm | ±0.005մմ | ±0.003մմ |